
Soft Actor Critic
Background
model-free DRL:
(-) very high sample complexity: even relatively simple tasks can require millions of steps of data collection, and complex behaviors with high-dimensional observations might need substantially more
(-) brittle convergence properties, which necessitate meticulous hyperparameter tuning
on-policy learning, i.e. TRPO,PPO,A3C, poor sample efficiency because:
they require new samples to be collected for each gradient step, however, the number of gradient steps and samples per step needed to learn an effective policy increases with task complexity
off-policy learning, i.e. DDPG:
reuse past experience, and attain better sample efficiency
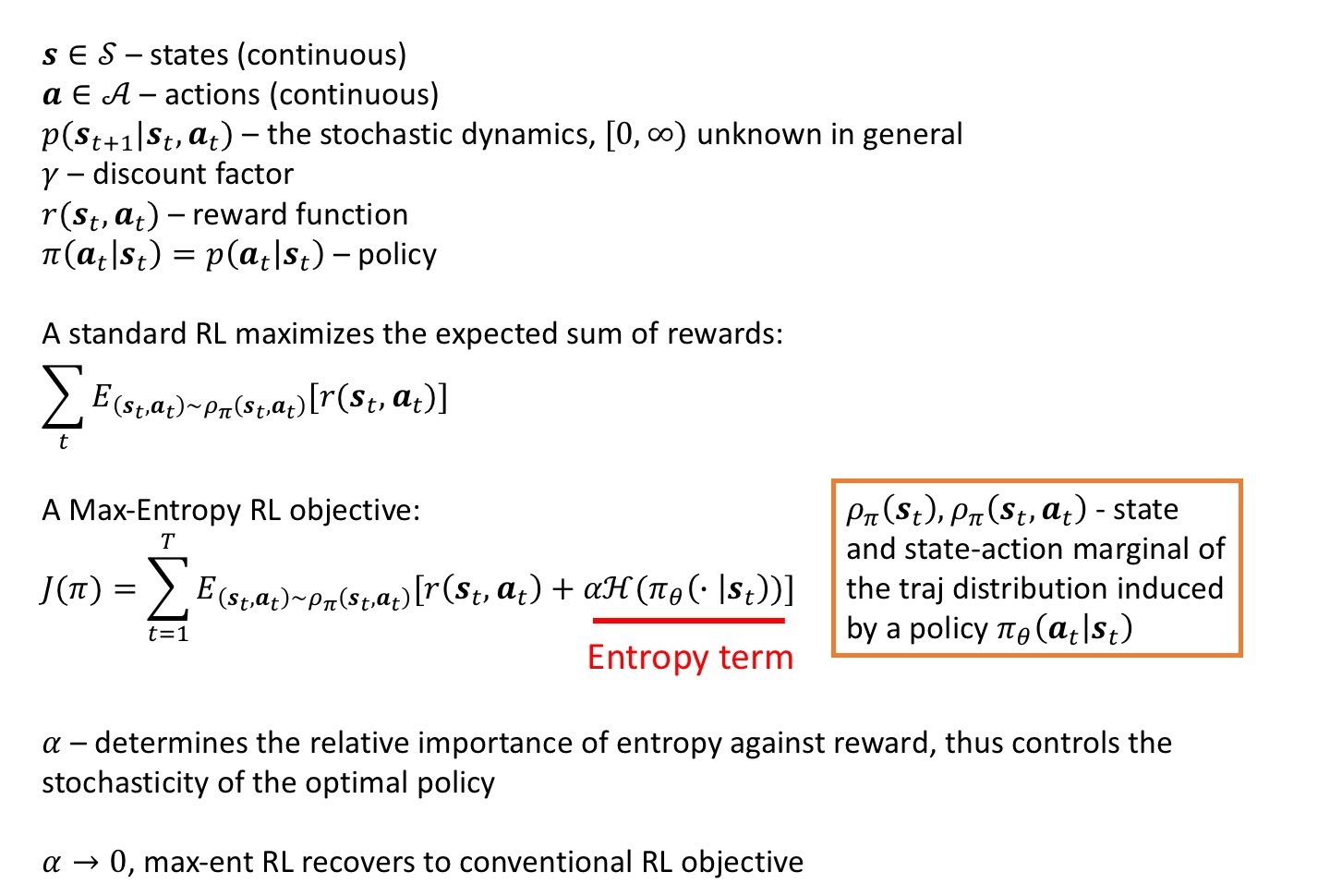
max-ent RL:
to succeed at the task while acting as randomly as possible
(+) provides a substantial improvement in exploration (acquiring diverse behaviors) and robustness (in the face of model and estimation errors)
max-ent on-policy:
[O’Donoghue et al 2016]
(-) suffer from poor sample complexity
max-ent off-policy:
[Schulman et al 2017a]
[Nachum et al 2017a]
[Haarnoja et al 2017]
(-) require complex approximate inference procedures in continuous action spaces
proposed SAC:
off-policy max-ent
humanoid benchmark with 21 action dimensions
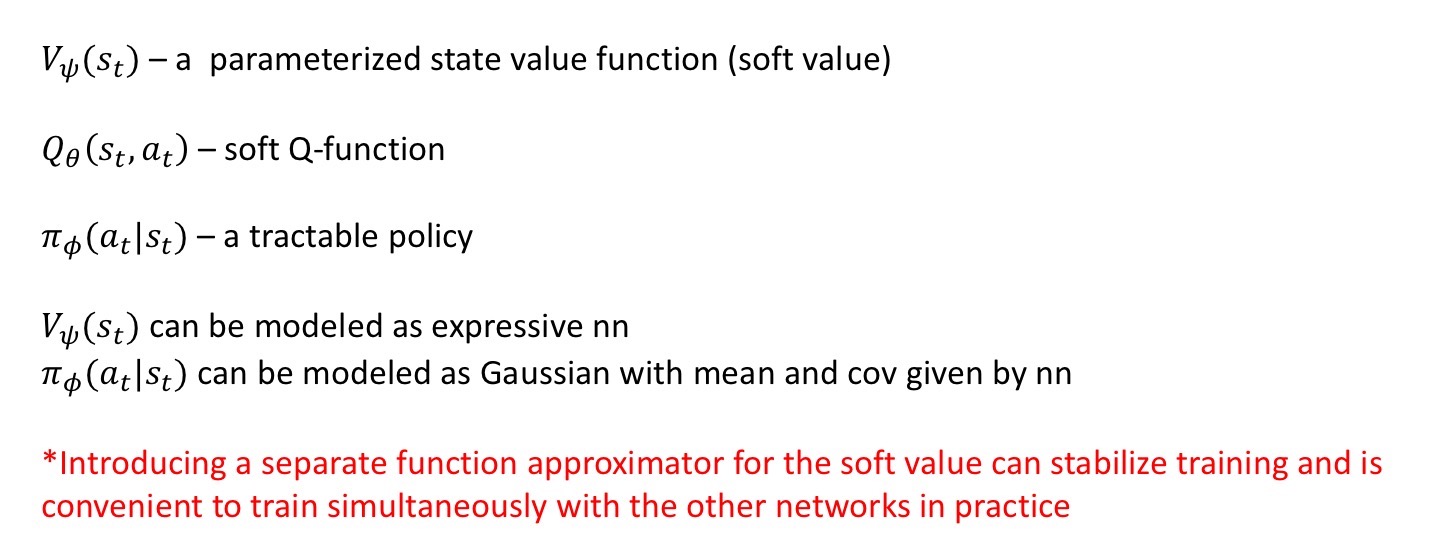
- an actor-critic architecture with separate policy and value function networks
- an off-policy formulation that enables resue of previously collected data for efficiency
- entropy maximization to enable stability and exploration
AC algs are derived starting from policy iteration alternates between
policy evaluation: computing the value function for a policy
policy improvement: using the value function to obtain a better policy
However, in large-scale RL problems, it is impractical to run either of above, and instead
the value function and policy are optimized jointly
policy -> actor
value function -> critic
compared algs:
TD3 - twin delayed deep deterministic policy gradient (latest best)
DDPG
DDPG adopts:
- a Q-function estimator to enable off-policy learning
- a deterministic actor that maximizes this Q function
SAC:
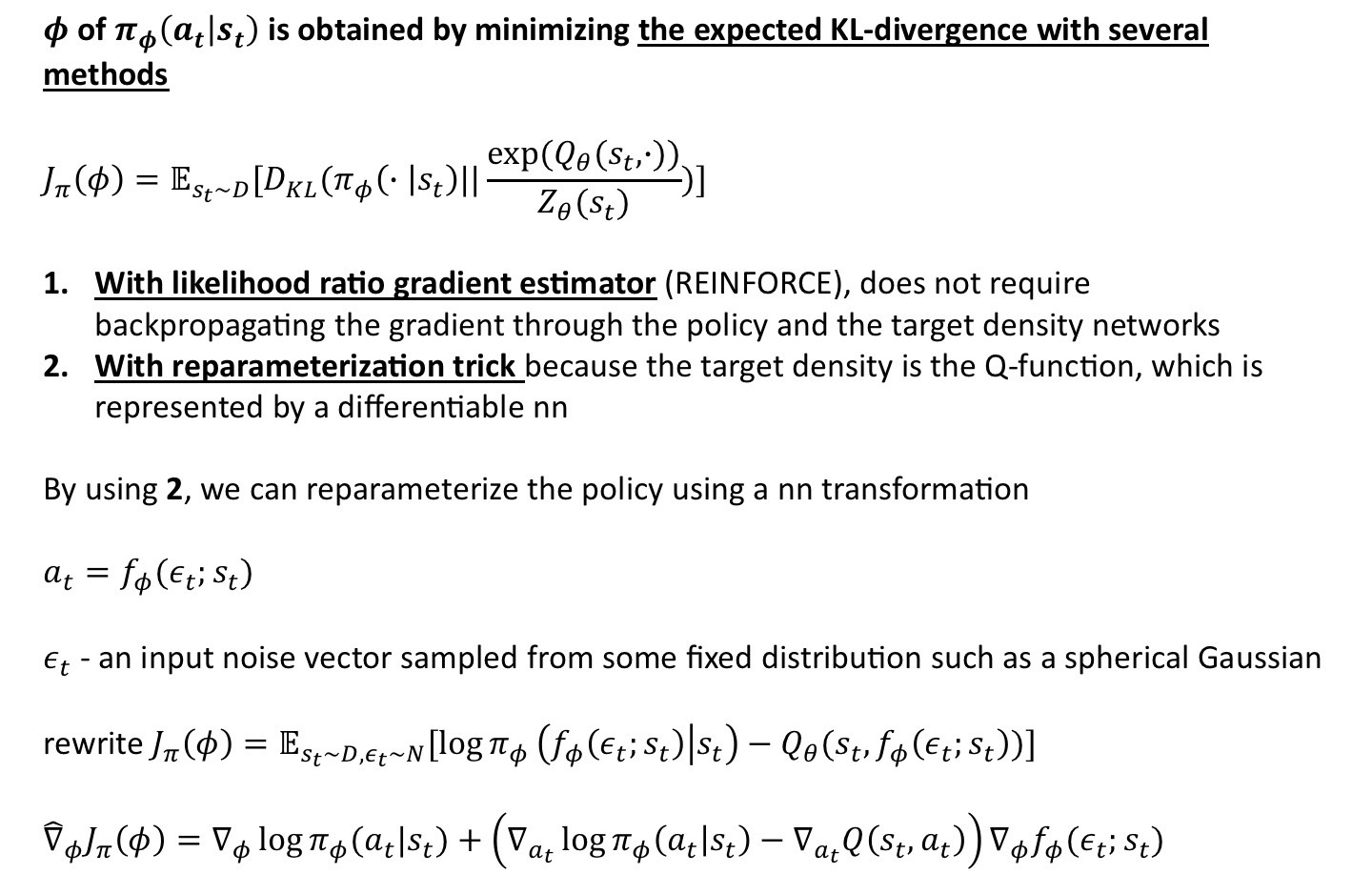
- a stochastic actor
max-ent related:
- Inverse RL [Ziebart et al 2008]
- optimal control [Todorov 2008] [Toussaint 2009] [Rawlik et al 2012]
- guided policy search [Levine & Koltun 2013] [Levine et al 2016]
-
connection between Q-learning and policy gradient [O’Donoghue et al 2016] [Haarnoja et al 2017] [Nachum et al 2017a] [Schulman et al 2017a]
- discrete action space [Nachum etl al 2017b] approximate the maximum entropy distribution with a Gaussian
- continuous action space [Haarnoja et al 2017] (soft Q learning)
soft Q learning has:
- a value function
- an actor network
however, it’s not a true actor critic alg, because:
the Q-function is estimating the optimal Q-function
the actor does not directly affect the Q-function except through the data distribution
the actor network is more like an approximate sampler, rather than the actor in an actor-critic alg
Crucially, the convergence of this method hinges on how well this sampler approximates the true posterior
Context
MaxEnt RL problem formulation
an infinite-horizon MDP
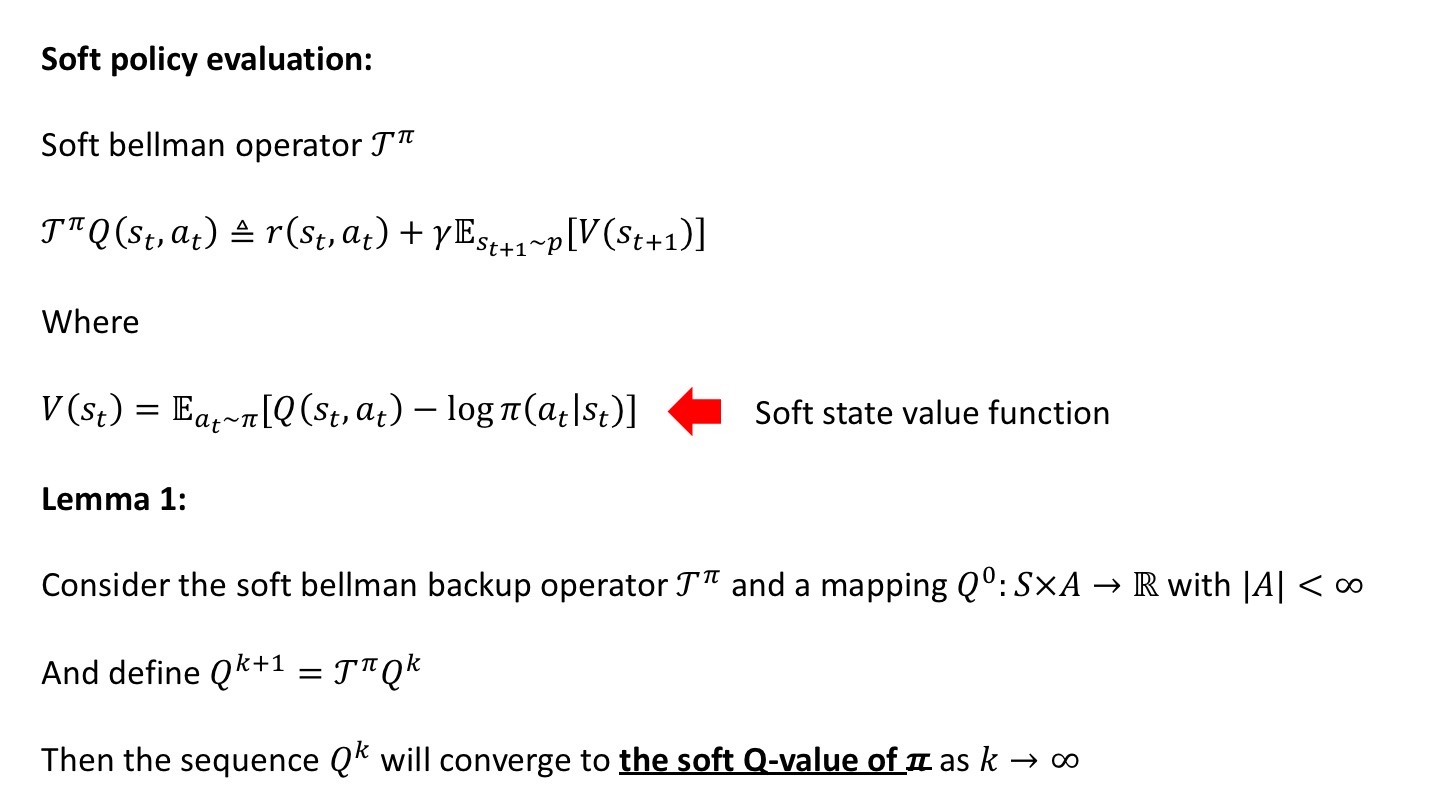
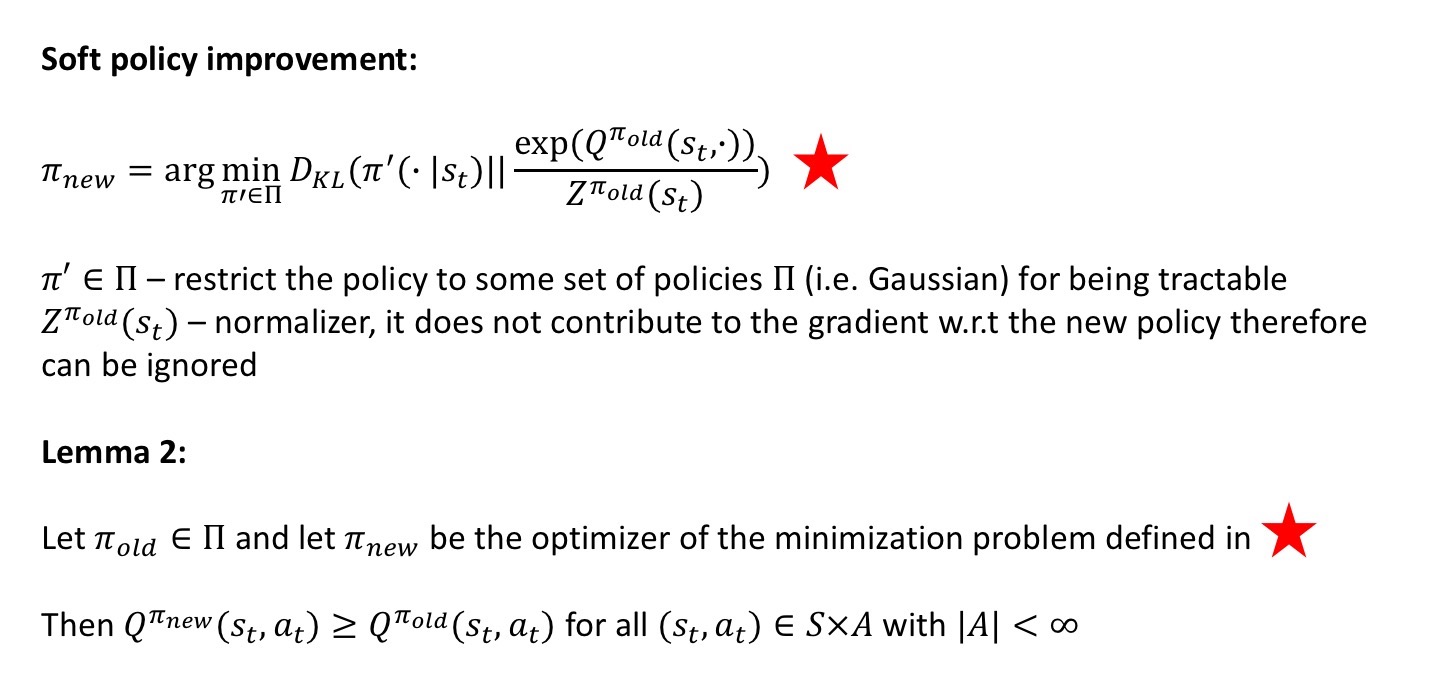
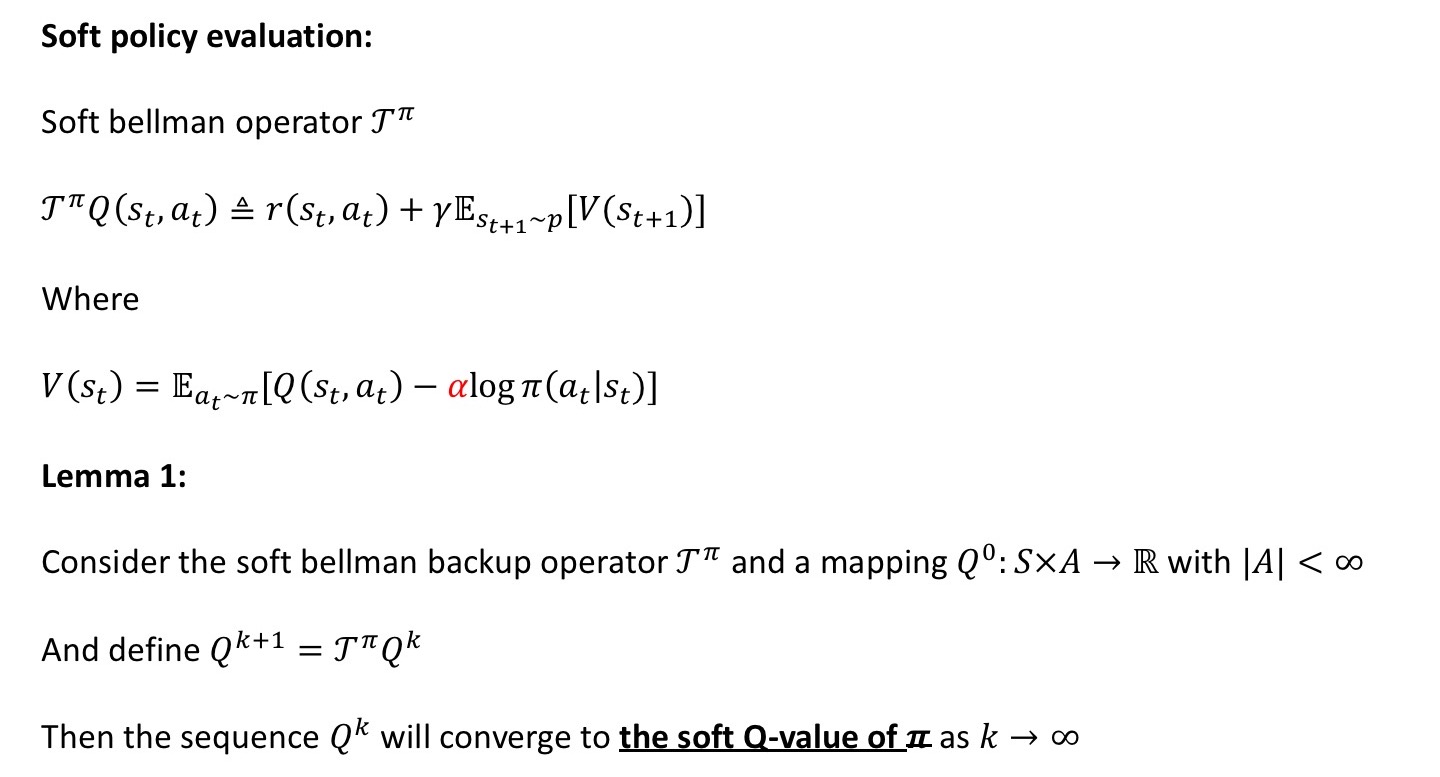
policy iteration:
- soft policy evaluation
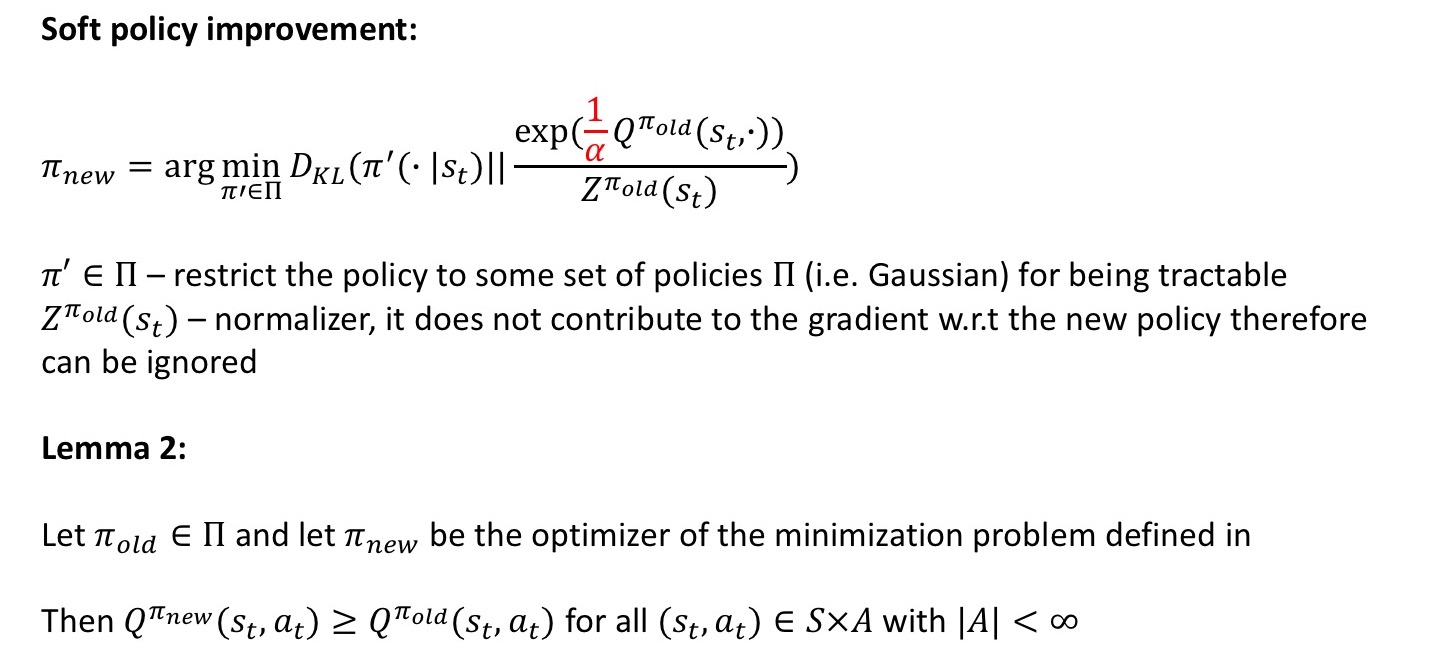
- soft policy improvement
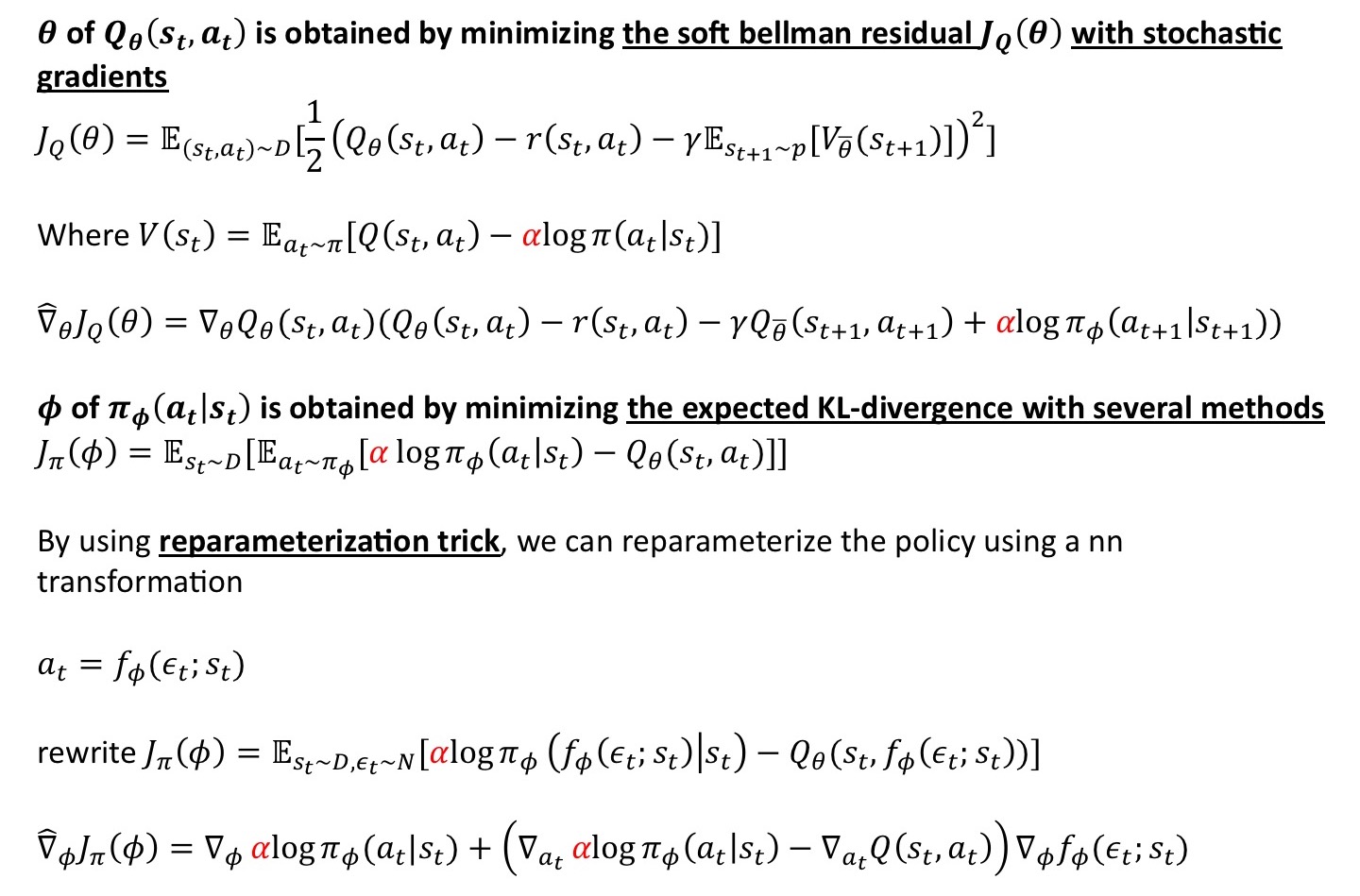
Soft Actor Critic
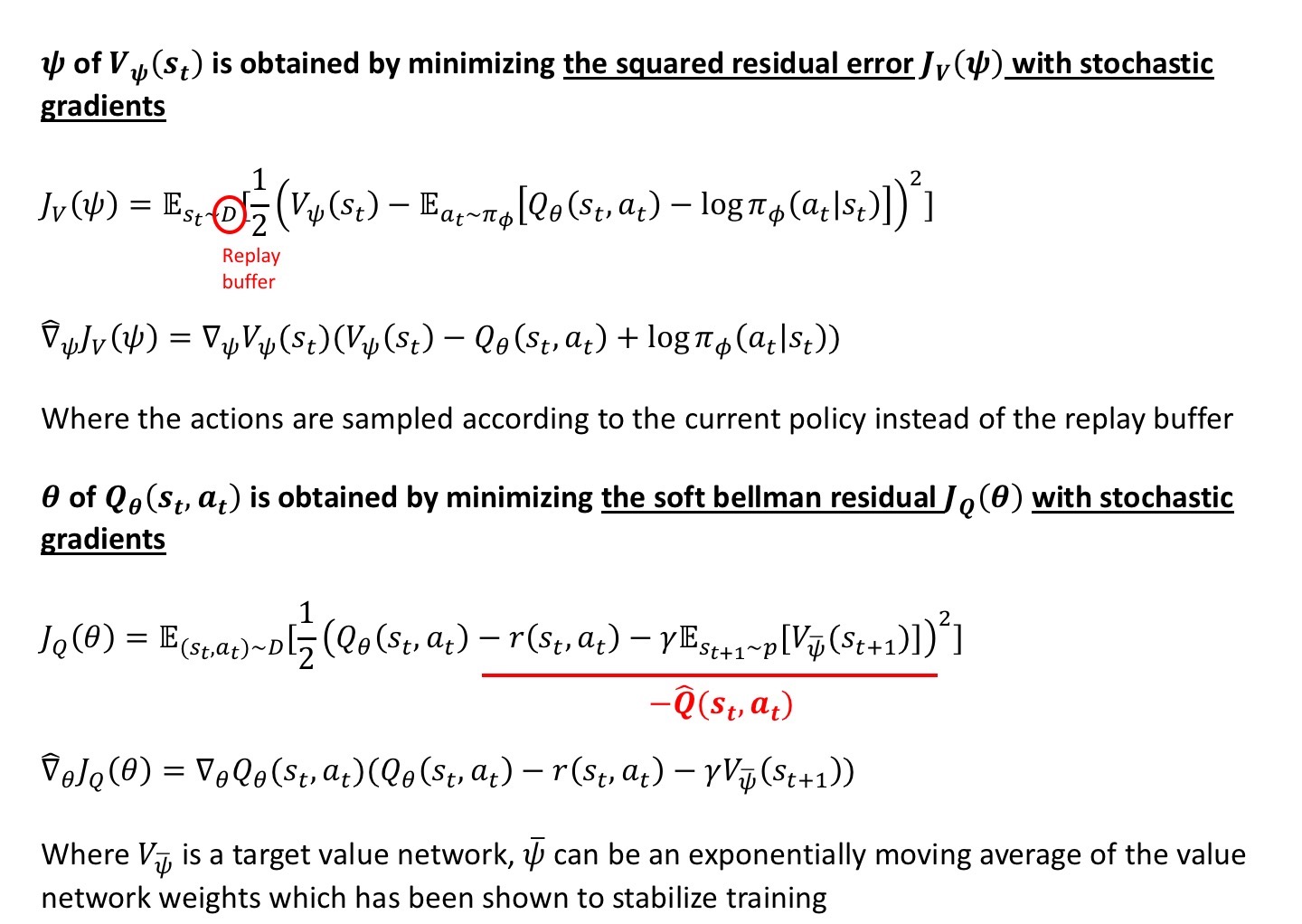
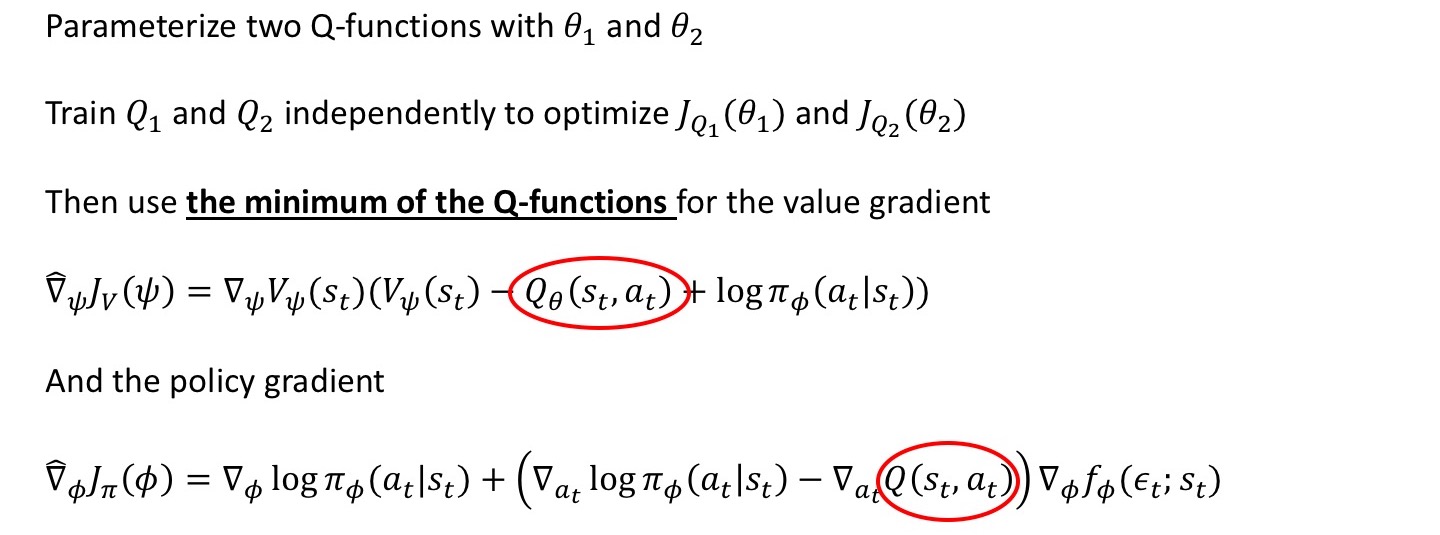
Two Q functions update:
Experiment
Compared with:
- DDPG (off-policy)
- PPO (on-policy)
- SQL (off-policy)
- TD3 (an extension to DDPG)
- Trust-PCL trust region path consistency learning
SAC has good performance in terms of complicated tasks such as Humanoid-v1 and Humanoid rllab
Ablation Study
Stochastic vs Deterministic Policy
The entropy appears in both the policy and value function
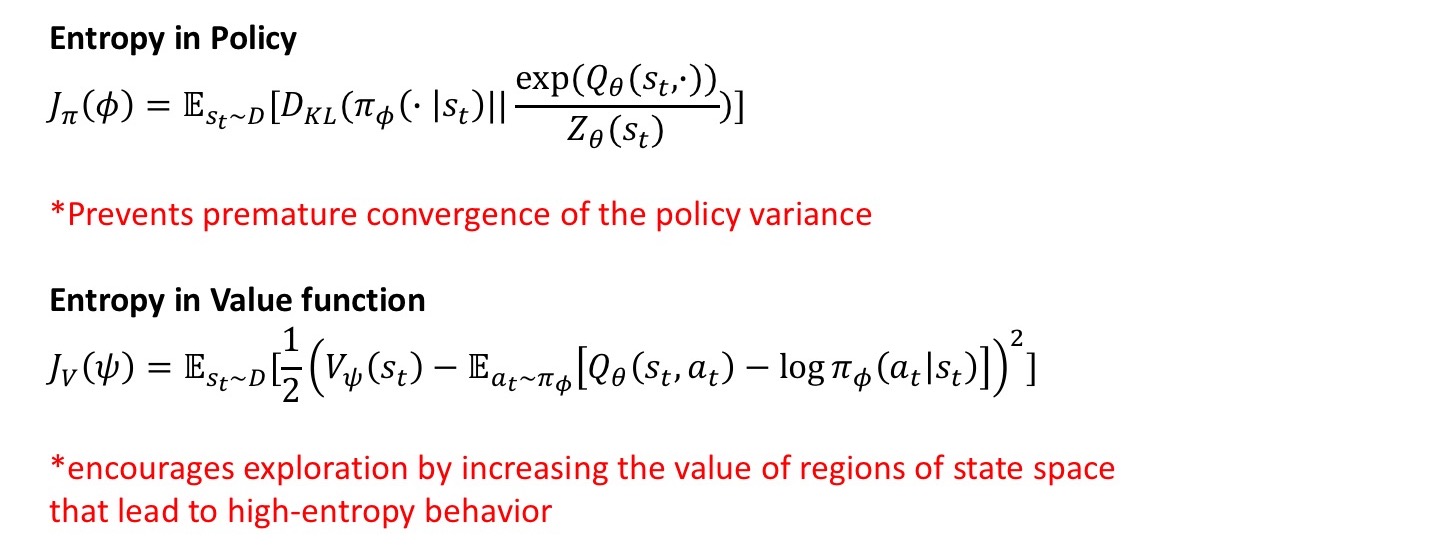
Stochasticity can stabilize training as the variability between the random seeds becomes much higher with a deterministic policy
Policy Evaluation
deterministic is better than Stochastic
Reward Scale
SAC is sensitive to the scaling of the reward signal, because it serves the role of temperature of the energy-based optimal policy and thus controls its stochasticity
Larger reward magnitudes correspond to lower entries
With the right reward scaling, the model balances exploration and exploitation, leading to faster learning and better asymptotic performance
Target Network Update
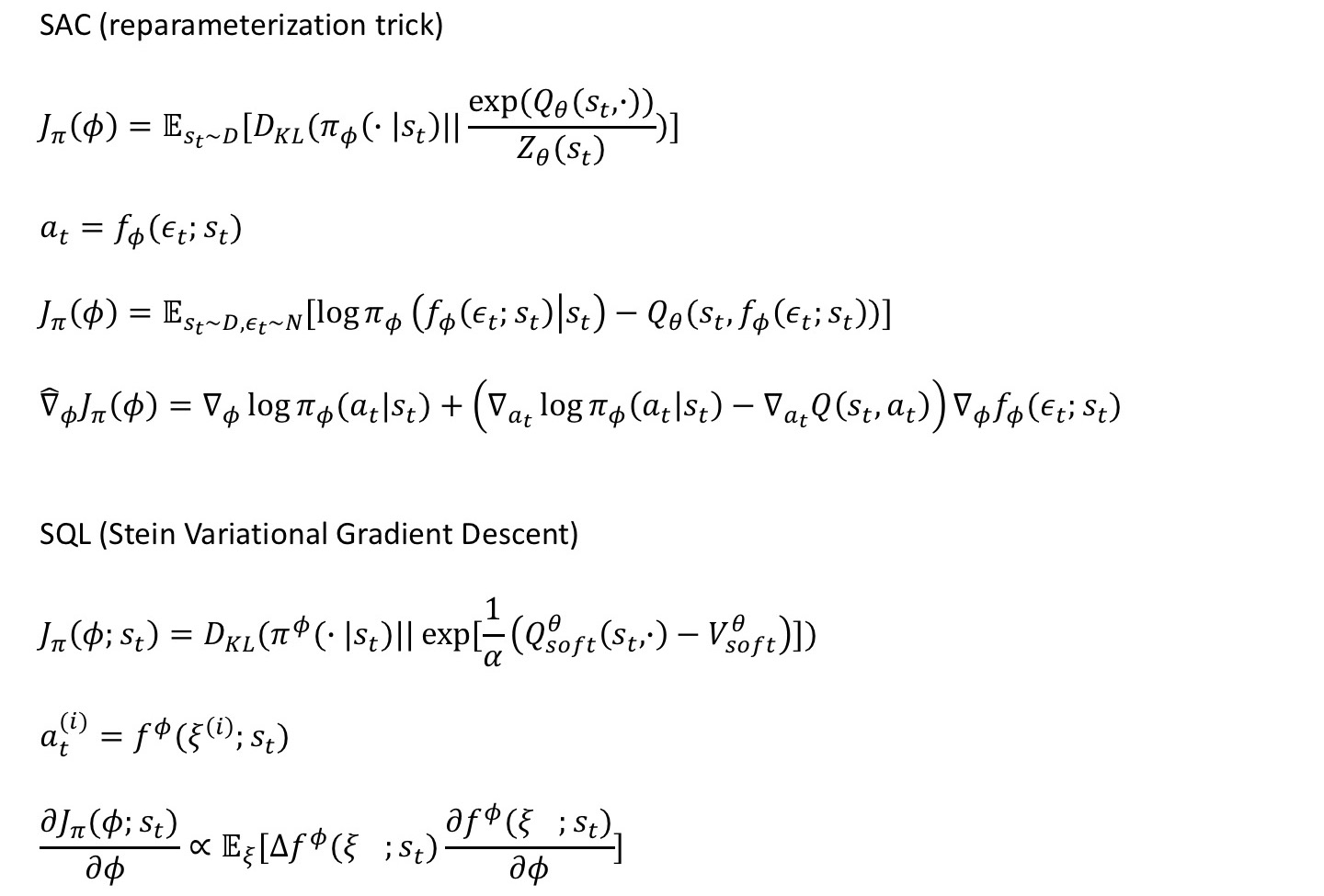
Comparison with SQL
Difference in Value function
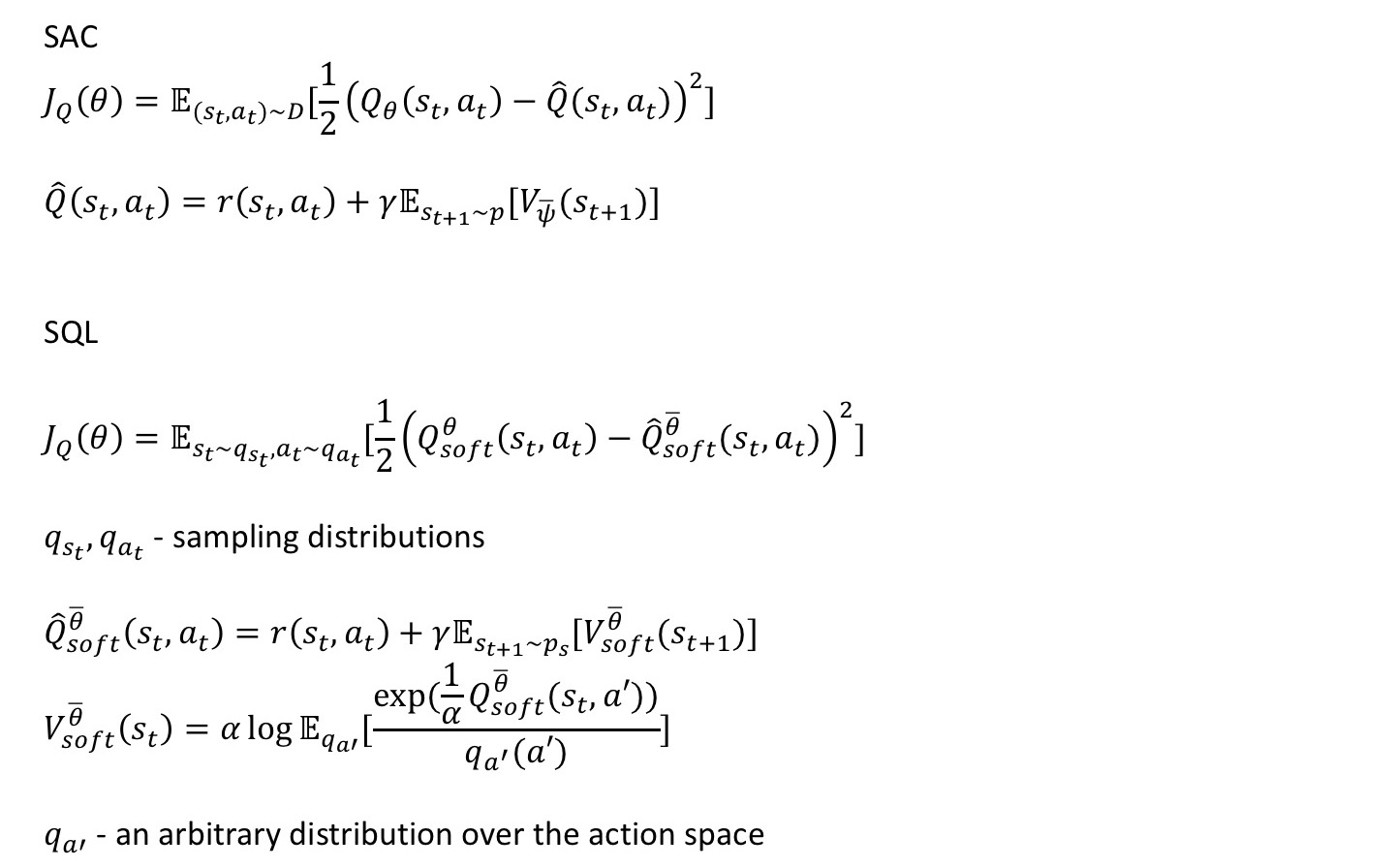
Difference in Policy
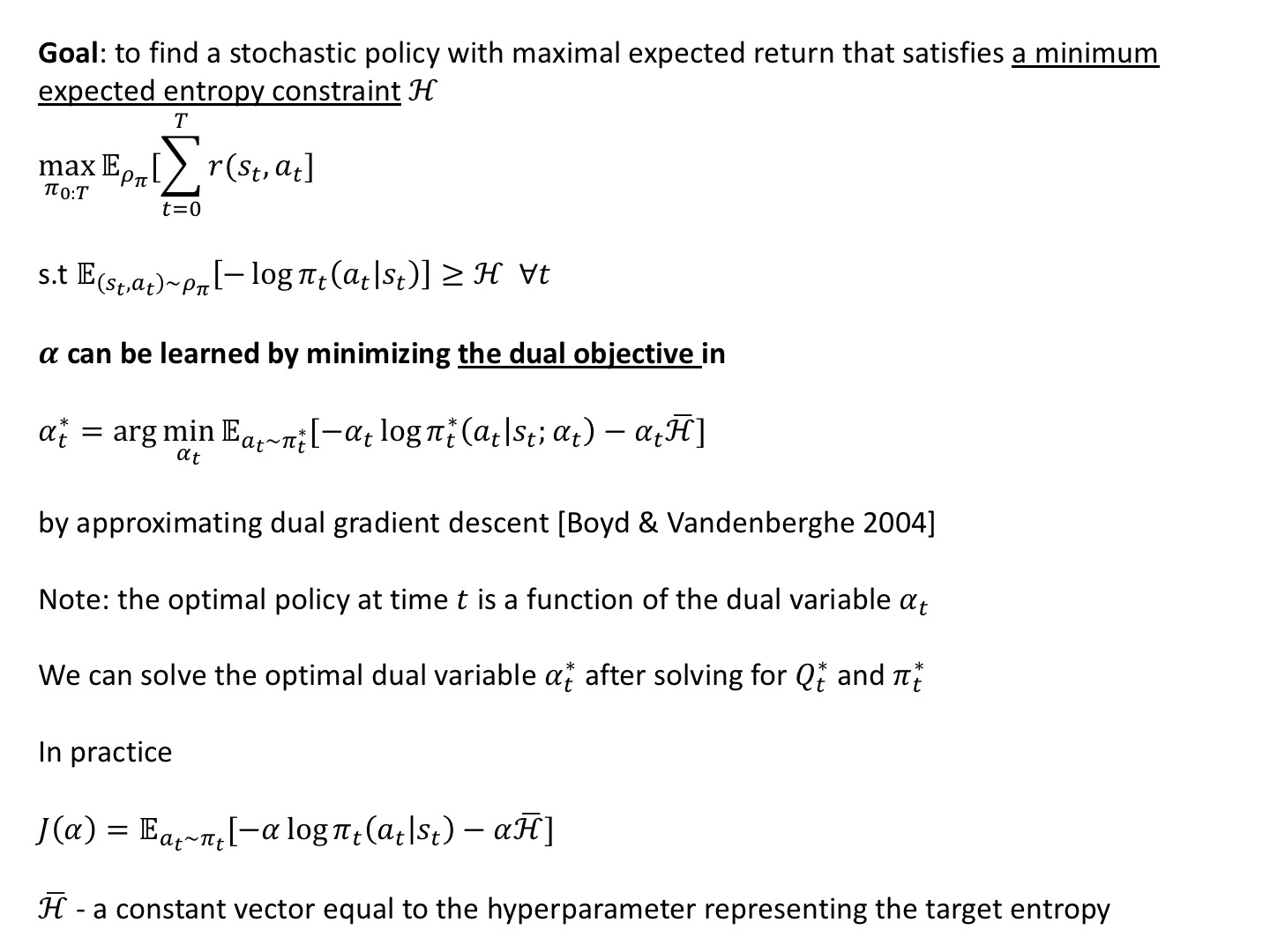
SAC with Automating Entropy Adjustment
SAC variant

Alpha-Entropy Objective
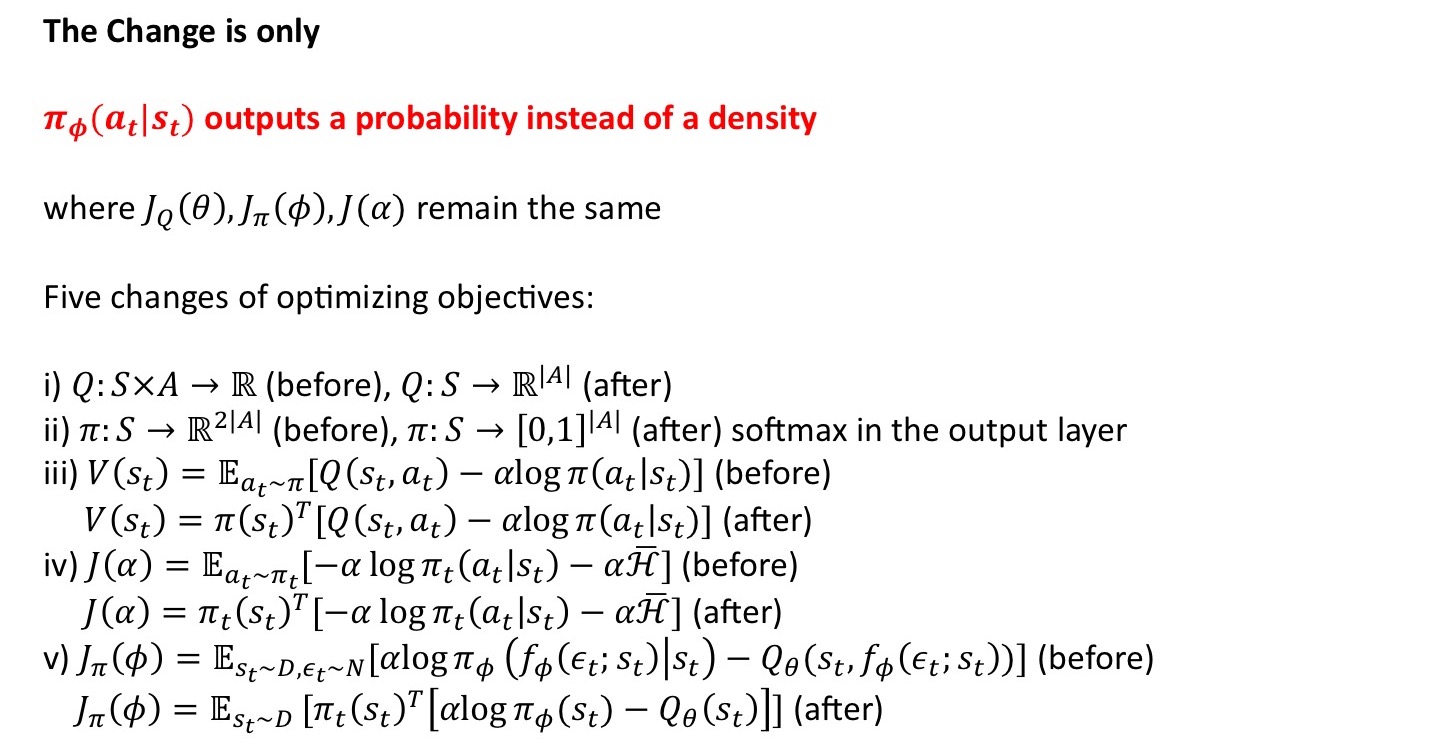
Discrete Soft AC
Refs
[1] Haarnoja, Tuomas, et al. “Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor.” arXiv preprint arXiv:1801.01290 (2018).
[2] Haarnoja, Tuomas, et al. “Soft actor-critic algorithms and applications.” arXiv preprint arXiv:1812.05905 (2018).
[3] Christodoulou, Petros. “Soft actor-critic for discrete action settings.” arXiv preprint arXiv:1910.07207 (2019).