Stochastic Optimization
Background
Stochastic optimization (SO) methods are optimization methods for minimizing or maximizing an objective function when randomness is present.
Randomness Injection through:
- the objective functions
- the constraint sets
can be other ways like random iterates, etc
Algorithms
- stochastic approximation SA [Robbins and Monro 1951]
- stochastic gradient descent
- finite-difference SA [Kiefer and Wolfowitz 1952]
- simultaneous perturbation SA [Spall 1992]
- scenario optimization
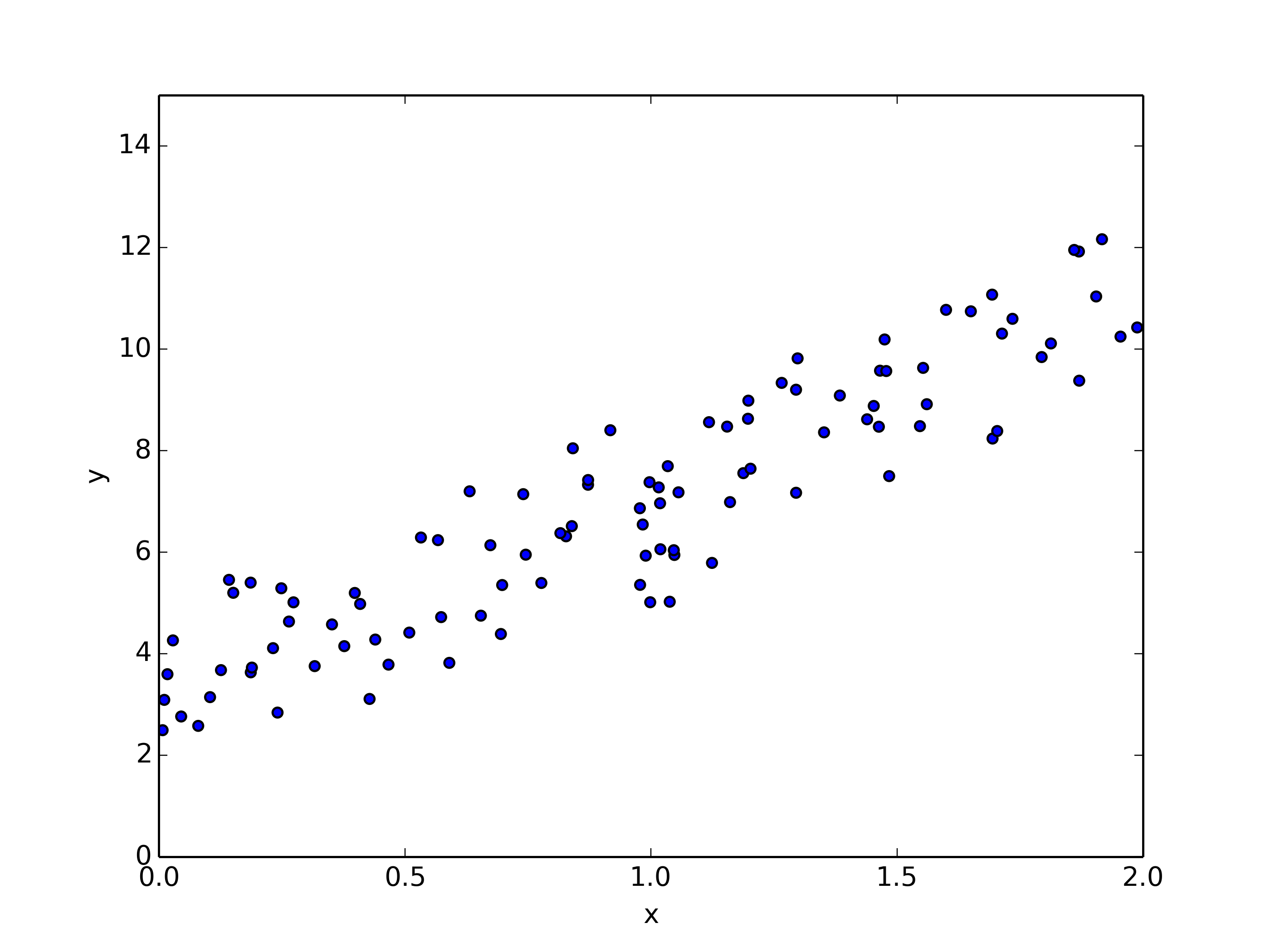
Example Problem
Given data generated from y=ax+b+ε, a=4, b=3: y=4x+3+ε find its estimated line
import numpy as np
x=2*np.random.rand(100) #0~2 uniform distribution data
y=3+4*x+np.random.randn(100) #0~1 normal distribution noise
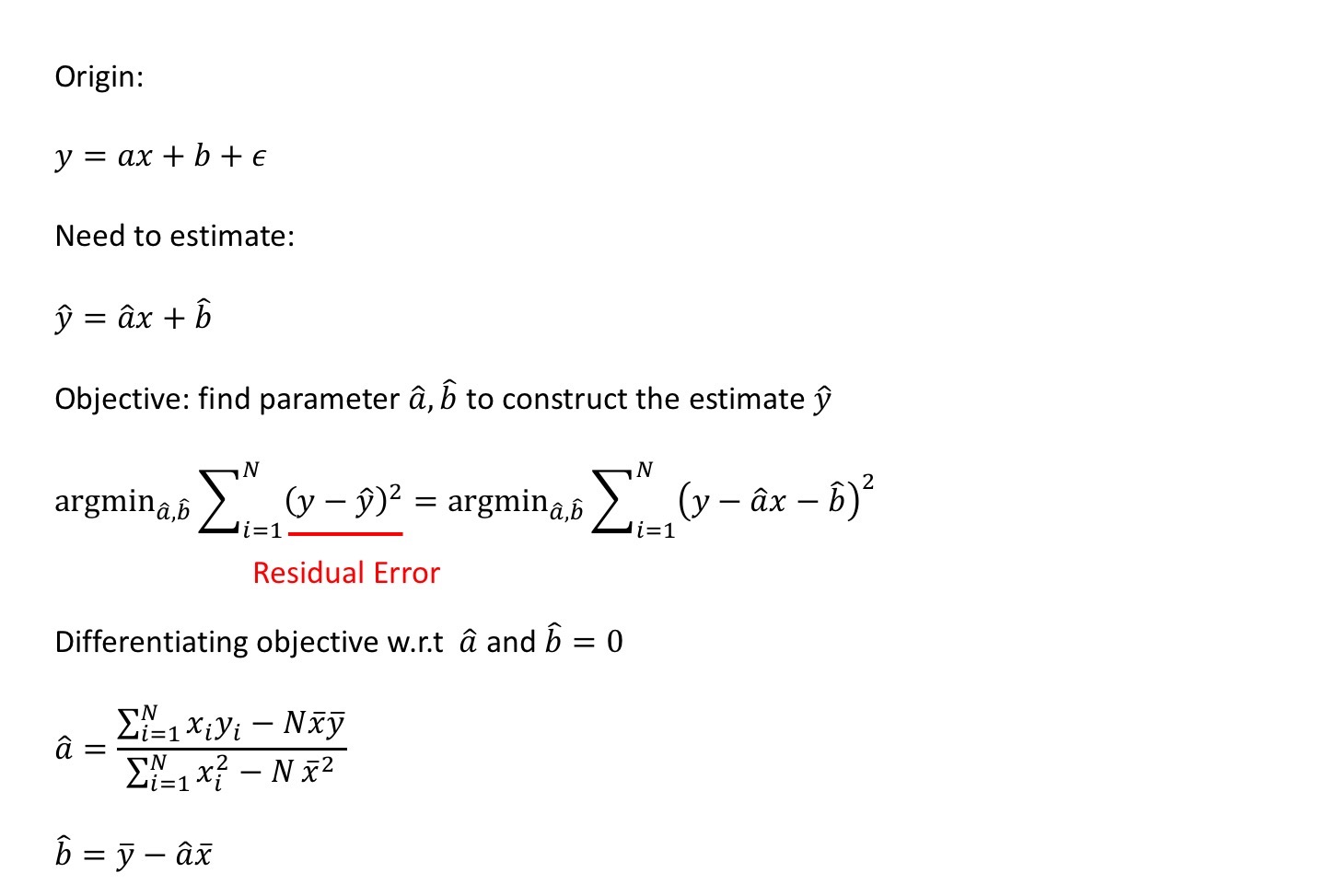
Analytical Solution
import matplotlib.pyplot as plt
n=len(x)
no=x.dot(y)-n*np.mean(x)*np.mean(y) #nominator
de=np.sum(np.power(x,2))-n*(np.mean(x))**2 #denominator
a_hat=no/de #4.117081503484073
b_hat=np.mean(y)-a_hat*np.mean(x) #2.936328604388291
y_hat=a_hat*x+b_hat
plt.scatter(x,y)
plt.plot(x,y_hat,'r')
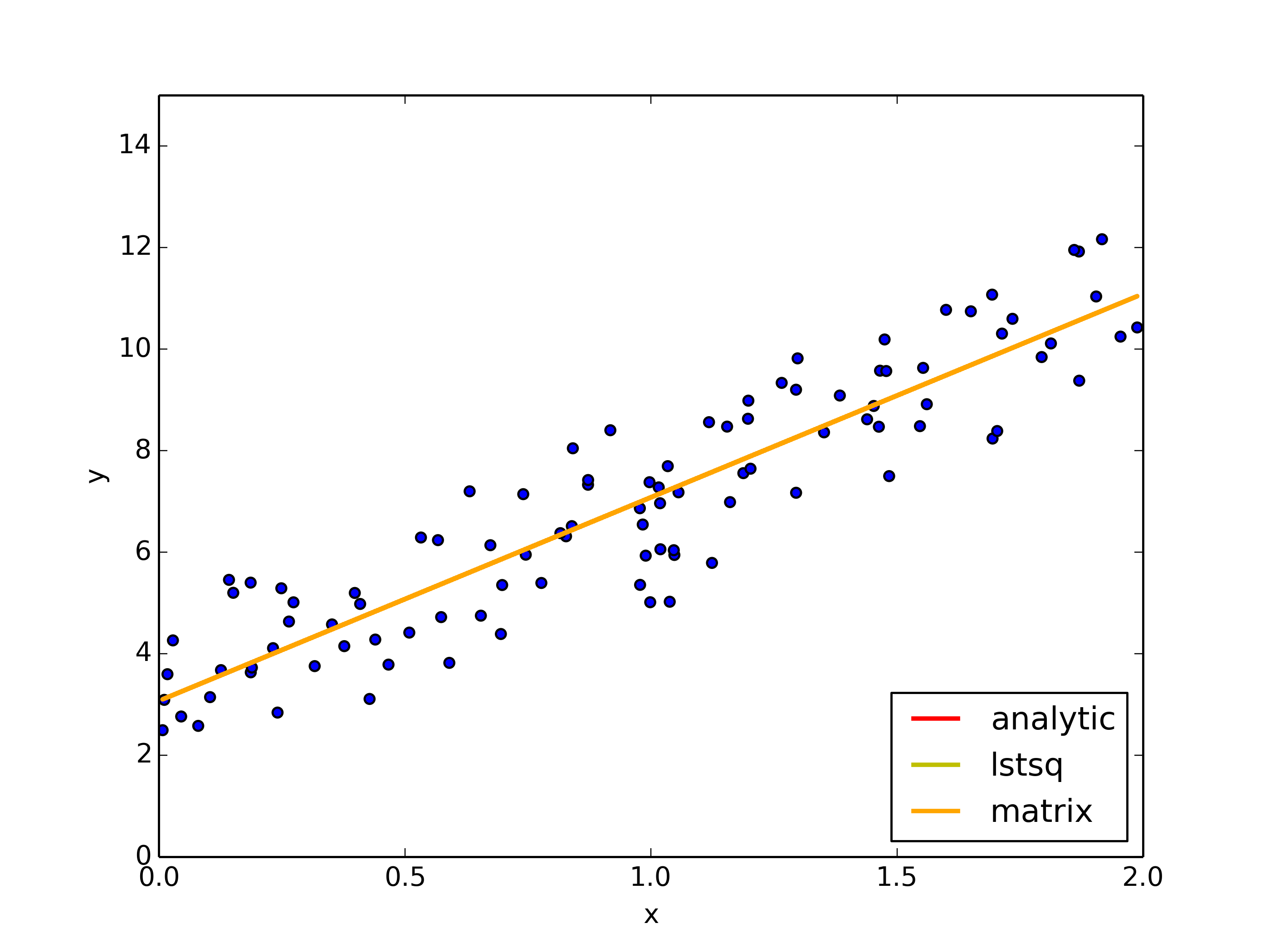
numpy.linalg.lstsq
X=np.vstack([x,np.ones(len(x))]).T
a,b=np.linalg.lstsq(X, y, rcond=None)[0]
numpy.linalg.inv - regression in matrix
X = 2 * np.random.rand(100,1)
y = 4 +3 * X+np.random.randn(100,1)
X_b = np.c_[np.ones((100,1)),X]
theta_best = np.linalg.inv(X_b.T.dot(X_b)).dot(X_b.T).dot(y)
Problem:
If the #feature increases, it’s hard to do the matrix multiplication anymore.
Solution:
Gradient Descent
Like descending down a mountain without assistance but information about the height over sea-level.
Repeatedly choose a direction and check if the height is smaller than before.
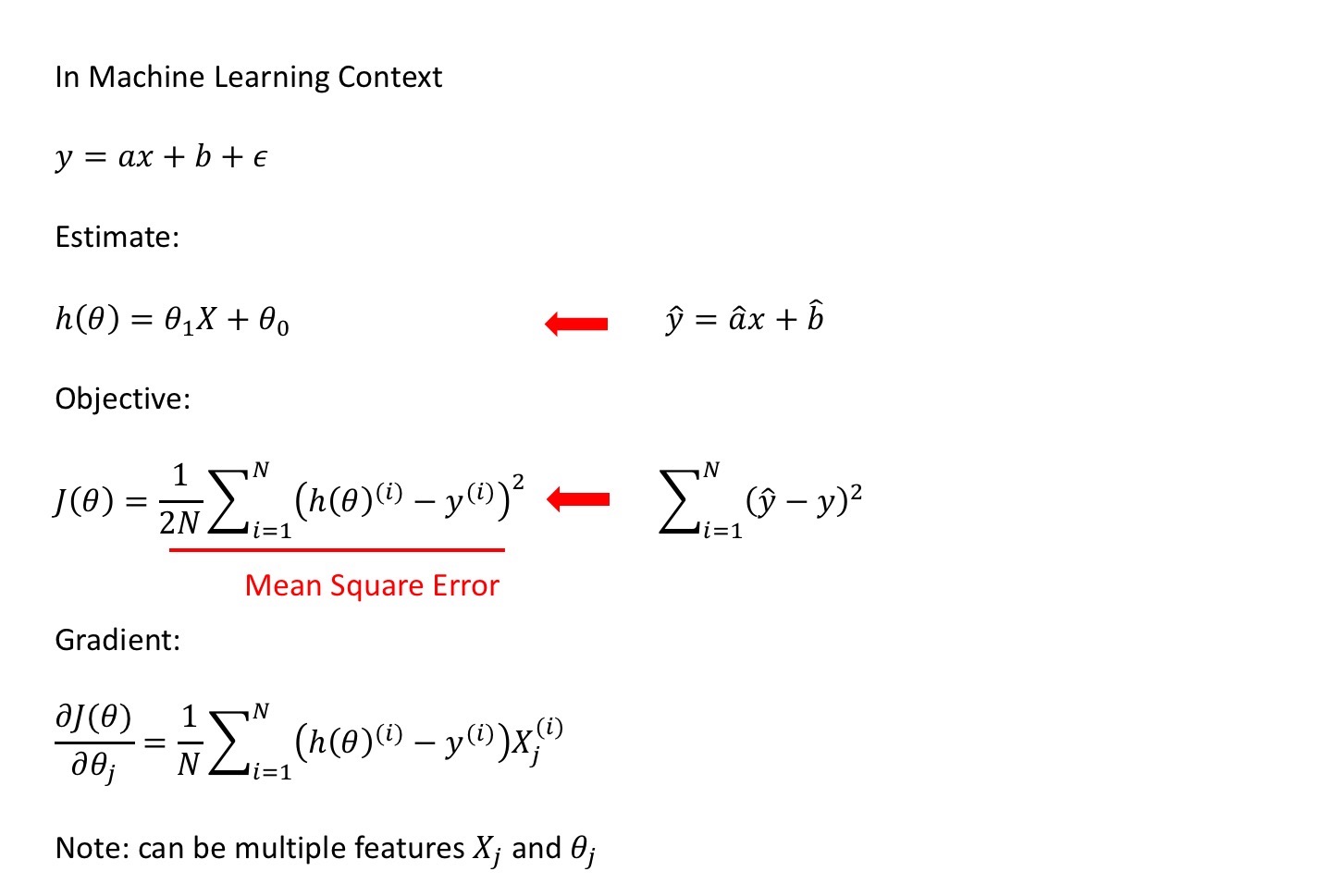
Machine learning analogy:
- learning rate - size of per step
- objective function - height
- gradient - direction of each step
Reformulate the problem setting:
from __future__ import division
import numpy as np
import matplotlib.pyplot as plt
x=2*np.random.rand(100,1) #0~2 uniform distribution data
y=3+4*x+np.random.randn(100,1) #0~1 normal distribution noise
def objective(theta,x,y):
n=len(y)
pred=x.dot(theta)
obj=(1/2*n)*np.sum(np.square(pred-y))
return obj
def gradient_descent(x,y,theta,alpha=0.01,iter=1000):
#data size
#x - 100x1, X - 100x2
#y - 100x1, pred - 100x1 - X*theta=100x2x2x1
#theta - 2x1
#grad - 2x1 - xT*(pred-y)=2x100x100x1
#theta_traj - 100x2
#grad_traj - 100x2
#obj_traj - 100
n=len(y)
obj_traj=np.zeros(iter)
theta_traj=np.zeros((iter,2))
for i in range(iter):
pred=x.dot(theta)
grad=(1/n)*(x.T.dot((pred-y)))
theta=theta-alpha*grad
theta_traj[i,:]=theta.T
obj_traj[i]=objective(theta,x,y)
return theta, theta_traj, obj_traj
#initilization
alpha=0.01
n_iter=1000
theta=np.random.randn(2,1)
X=np.c_[np.ones((len(x),1)),x] #[[1,x0],[1,x1]...
theta,theta_traj,obj_traj=gradient_descent(X,y,theta,alpha,n_iter)
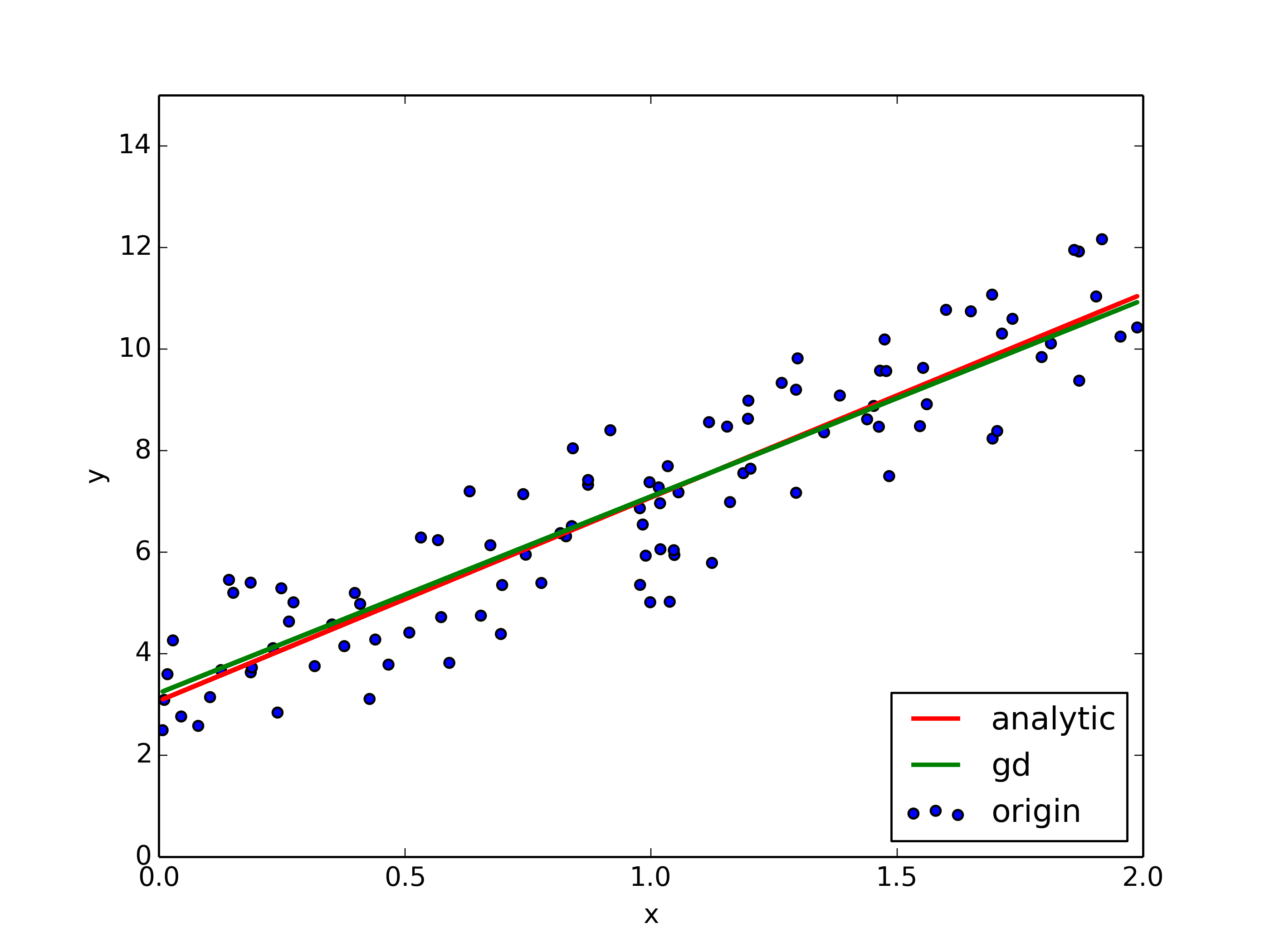
plt.scatter(x,y,label='origin')
plt.plot(x,theta[1]*x+theta[0],'g',label='gradient_descent')
Fitted results and the parameter trajs

Stochastic Gradient Descent
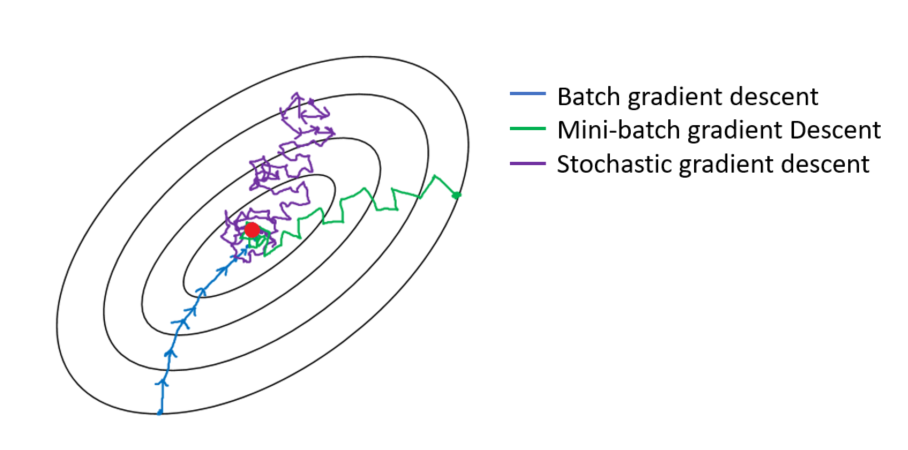
In Gradient Descent, parameter gradients are computed on all observations (sample) at each iteration.
In Stochastic Gradient Descent, we can choose the observation (sample) randomly instead of a single group or in the order they appear in the training set.
def sgd(x,y,theta,alpha=0.01,iter=1000):
#data size
#X - 100x2
#y - 100x1,
#x_i - 1x2
#y_i - 1x1
#theta - 2x1
#pred - 1x1 - x_i*theta=1x2x2x1
#grad - 2x1 - x_iT*(pred-y)=2x1x1x1
#theta_traj - 100x2
#grad_traj - 100x2
#obj_traj - 100
n=len(y)
obj_traj=np.zeros(iter)
grad_traj=np.zeros((iter,2))
for i in range(iter):
obj=0
for j in range(n):
rand_i=np.random.randint(0,n)
x_i=x[rand_i,:].reshape(1,x.shape[1])
y_i=y[rand_i].reshape(1,1)
pred=x_i.dot(theta)
grad=(1/n)*(x_i.T.dot((pred-y_i)))
theta=theta-alpha*grad
obj+=objective(theta,x_i,y_i)
grad_traj[i,:]=grad.T
obj_traj[i]=obj
return theta, obj_traj, grad_traj
#initilization
alpha=0.01
n_iter=1000
theta=np.random.randn(2,1)
X=np.c_[np.ones((len(x),1)),x]
theta,obj_traj,grad_traj=sgd(X,y,theta,alpha,n_iter)
Mini-Batch Stochastic Gradient Descent
Uses random samples in batches.
def mini_sgd(x,y,theta,alpha=0.01,iter=1000,batch_size=20):
#data size
#X - 100x2
#y - 100x1,
#batch size 20
#x_i - 20x2
#y_i - 20x1
#theta - 2x1
#pred - 20x1 - x_i*theta=20x2x2x1
#grad - 2x1 - x_iT*(pred-y)=2x20x20x1
#theta_traj - 100x2
#grad_traj - 100x2
#obj_traj - 100
n=len(y)
obj_traj=np.zeros(iter)
grad_traj=np.zeros((iter,2))
for i in range(iter):
obj=0
i_s=np.random.permutation(n)
x=x[i_s]
y=y[i_s]
for j in range(0,n,batch_size): #[0,20,40,60,80]
x_i=x[j:j+batch_size]
y_i=y[j:j+batch_size]
pred=x_i.dot(theta)
grad=(1/n)*(x_i.T.dot((pred-y_i)))
theta=theta-alpha*grad
obj+=objective(theta,x_i,y_i)
obj_traj[i]=obj
grad_traj[i,:]=grad.T
return theta, obj_traj, grad_traj
#initilization
alpha=0.01
n_iter=1000
#alpha_m=0.1
#n_iter_m=200
theta=np.random.randn(2,1)
batch_size=20
X=np.c_[np.ones((len(x),1)),x]
theta_msgd,obj_traj_msgd,grad_traj_msgd=mini_sgd(X,y,theta,alpha,n_iter,batch_size)
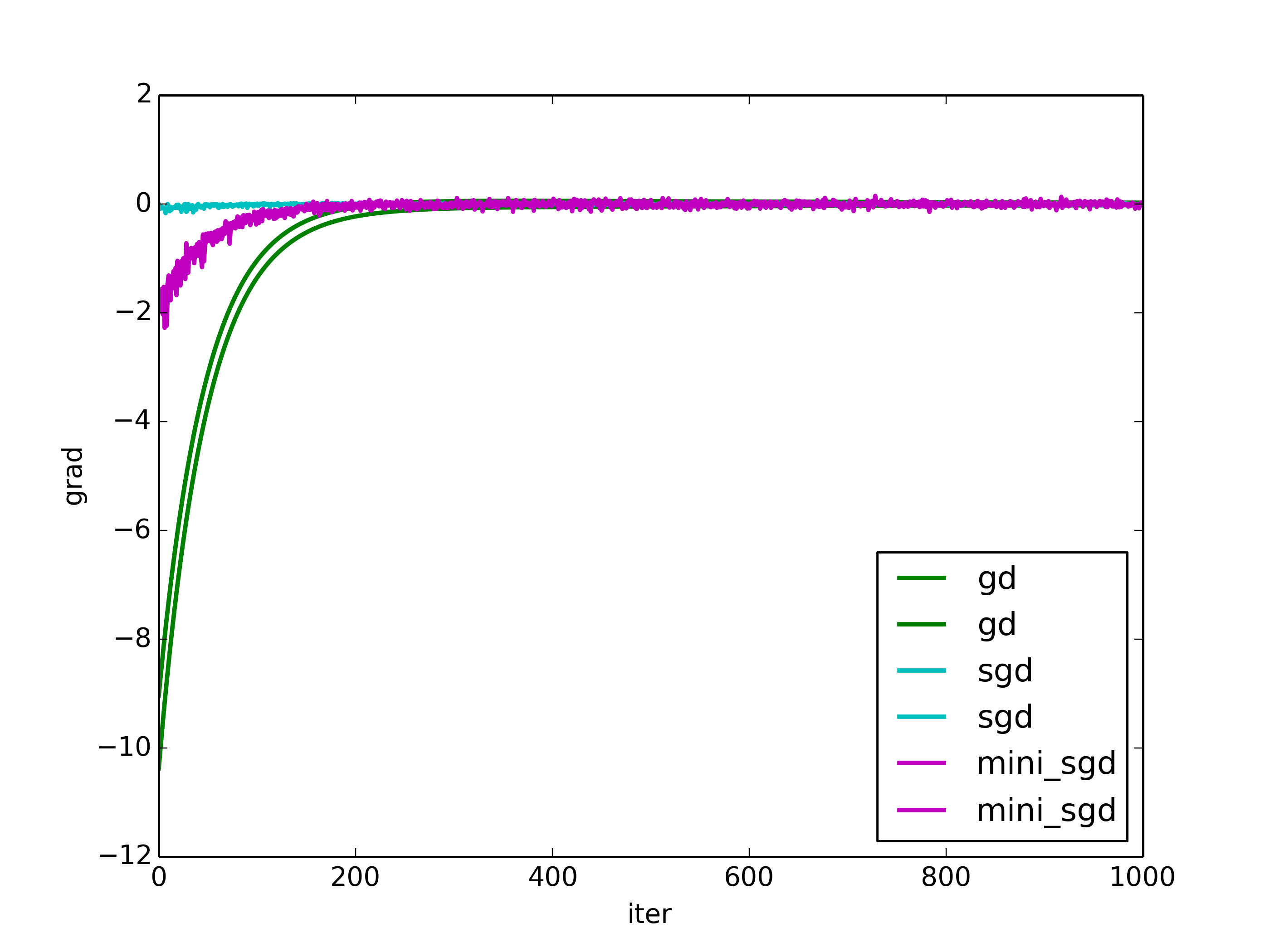
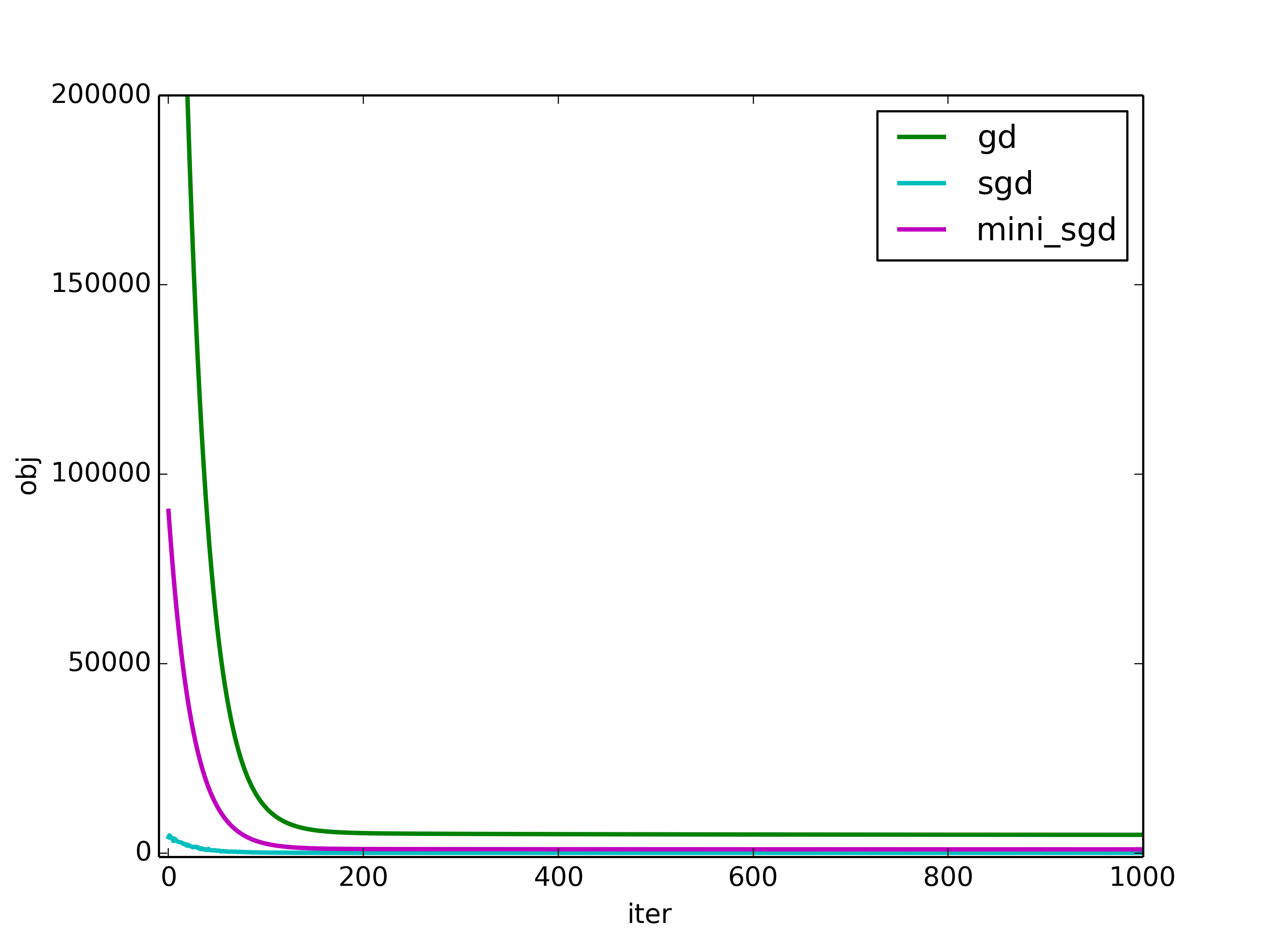
Fitted results
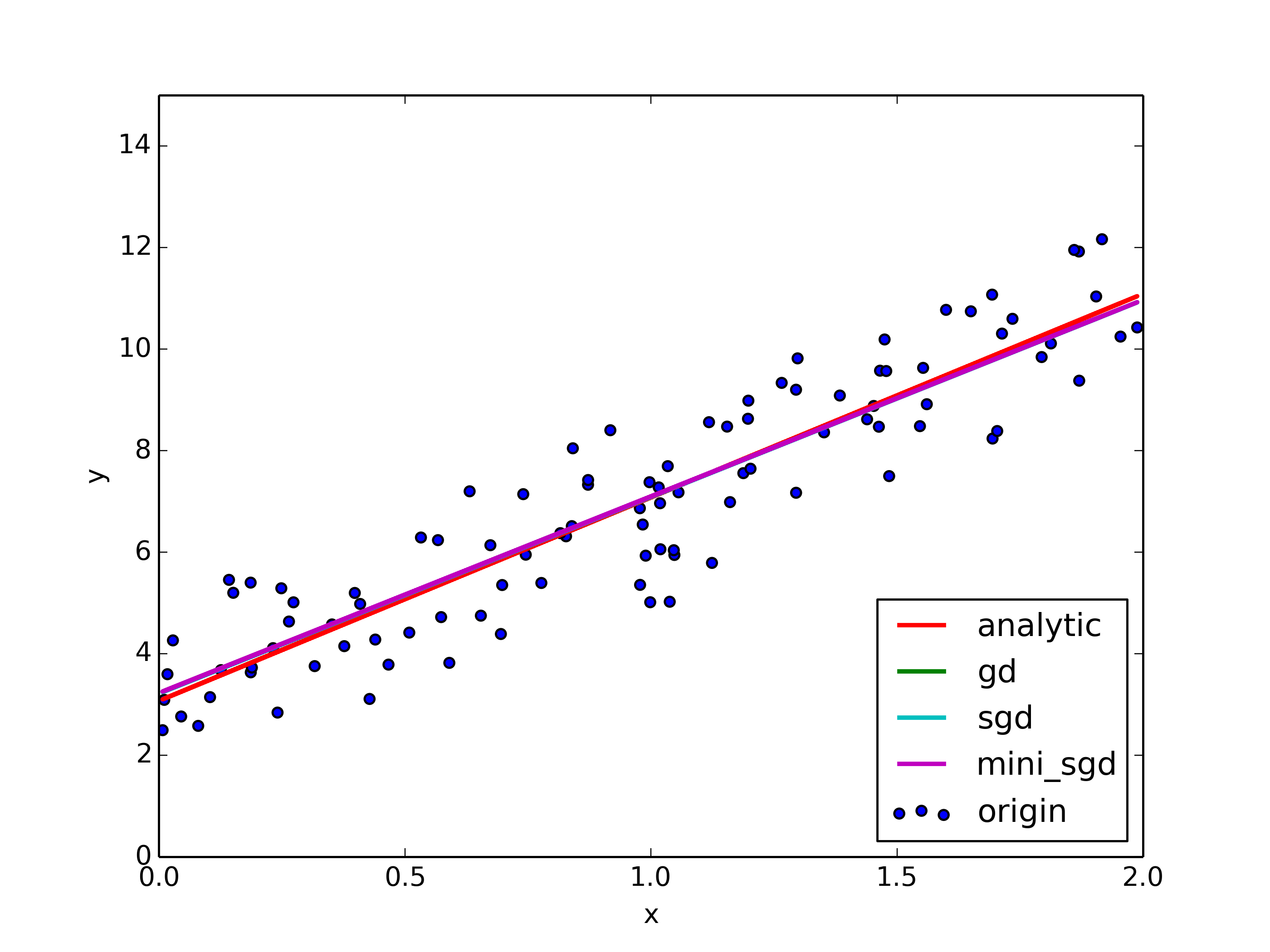
The gradients and the objective convergence