
Maximum Entropy RL
Definition
Randomness is for exploration
a ~ π(a|s) - policy is defined by a probability distribution, in many RL algorithms
For discrete actions, picking one of many possible actions, a categoritcal distribution is used (left fig)
For continuous actions, a Gaussian with a mean and a std may be used (right fig)
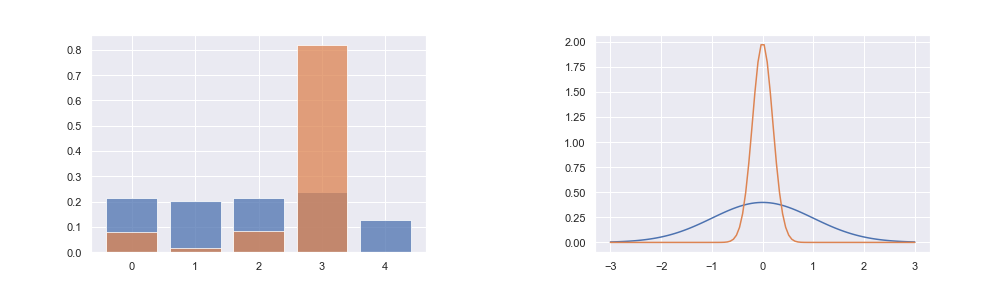
With these kinds of policies, the randomness of the actions an agent takes can be quantified by the entropy of that probability distribution
The greater the entropy, the more random the actions an agent takes
High entropy - more disorer (blue lines in the fig), Low entropy (orange lines in the fig)
Entropy of a discrete probability distribution p:
H(X) = E [I(X)] = - Σ p(x)logp(x)
X x∈X
RL process will naturally lead to the entropy of the action selection policy decreasing (from blue lines to oranges lines), i.e. annealing of a Boltzmann softmax policy
Encouraging Entropy
It is also typical to add “entropy bonus” to the loss function to encourage the agent to take actions more unpredictably (with higher randomness)
Entropy Bonus:
(+) avoid an agent quickly converges to a local, but not necessarily globally optimal policy
Similar as optimizing for the long-term sum of future rewards, we can also optimize for the long-term sum of entropy:
It is optimal for an agent to learn not only to get as many future rewards as possible, but also to put itself in positions where its future entropy will be the largest!!
∞
π* = argmax E [Σ γ^t (r+αH^π)]
π π t=0 |t |t
High entropy also means adaptive to env changes: keeping pre-existing ways or trying new ways
The key is to plan not only for a good outcome, but the ability to change when the world does!!
High entropy policy:
H(π(.|s)) = - Σ π(a|s)log π(a|s) = E [ -log π(a|s)]
a a~π(.|s)
(+) high entropy policy means higher disorder in policy
(+) try new risky behaviors <=> potentially explore unexplored regions
Standard MDP:
max E [Σ γ^t r(st,at)]
π π t
MaxEnt MDP:
max E {Σ γ^t [r(st,at)+H(π(.|st))]}
π π t
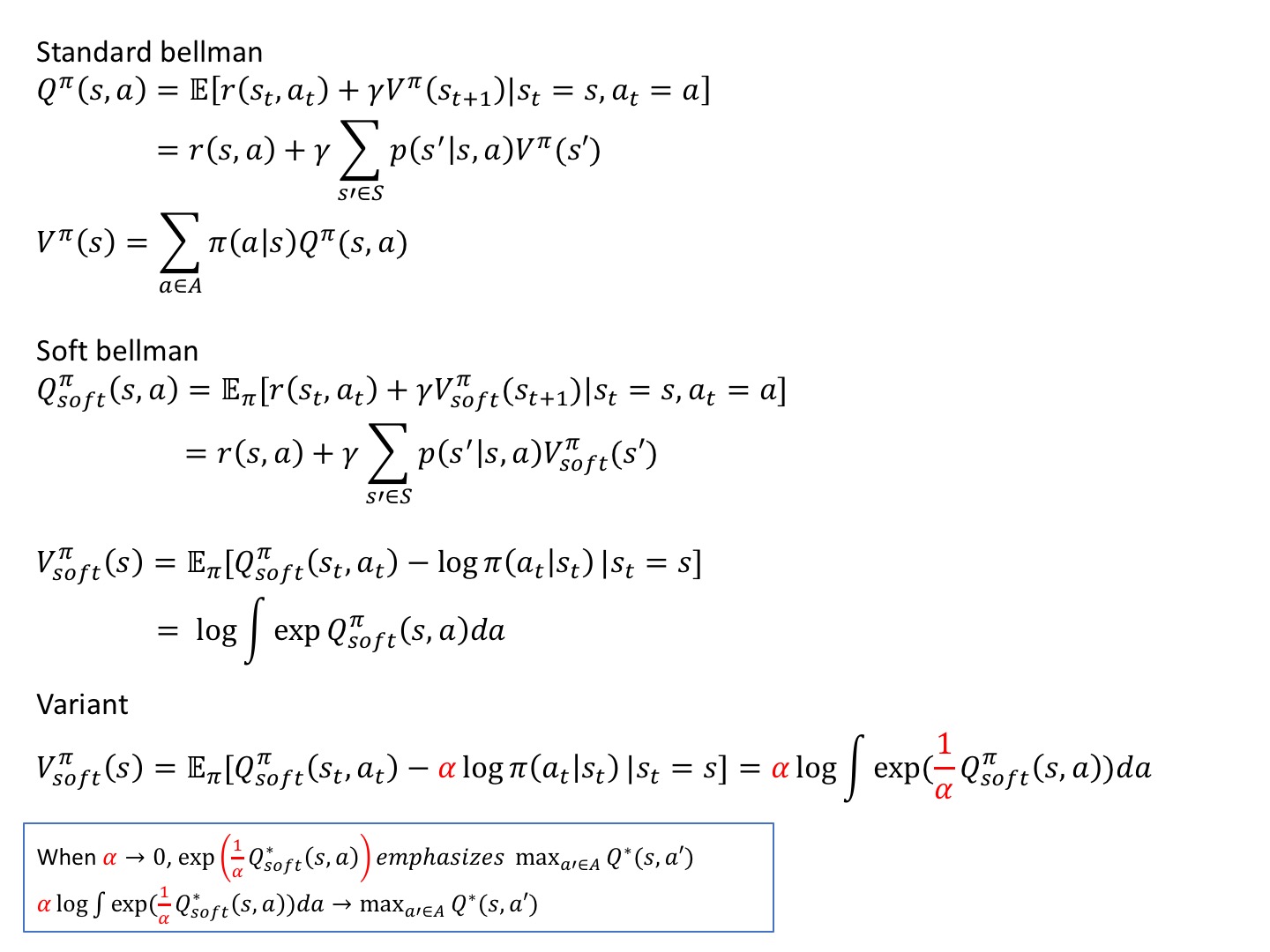
Theorem 1:
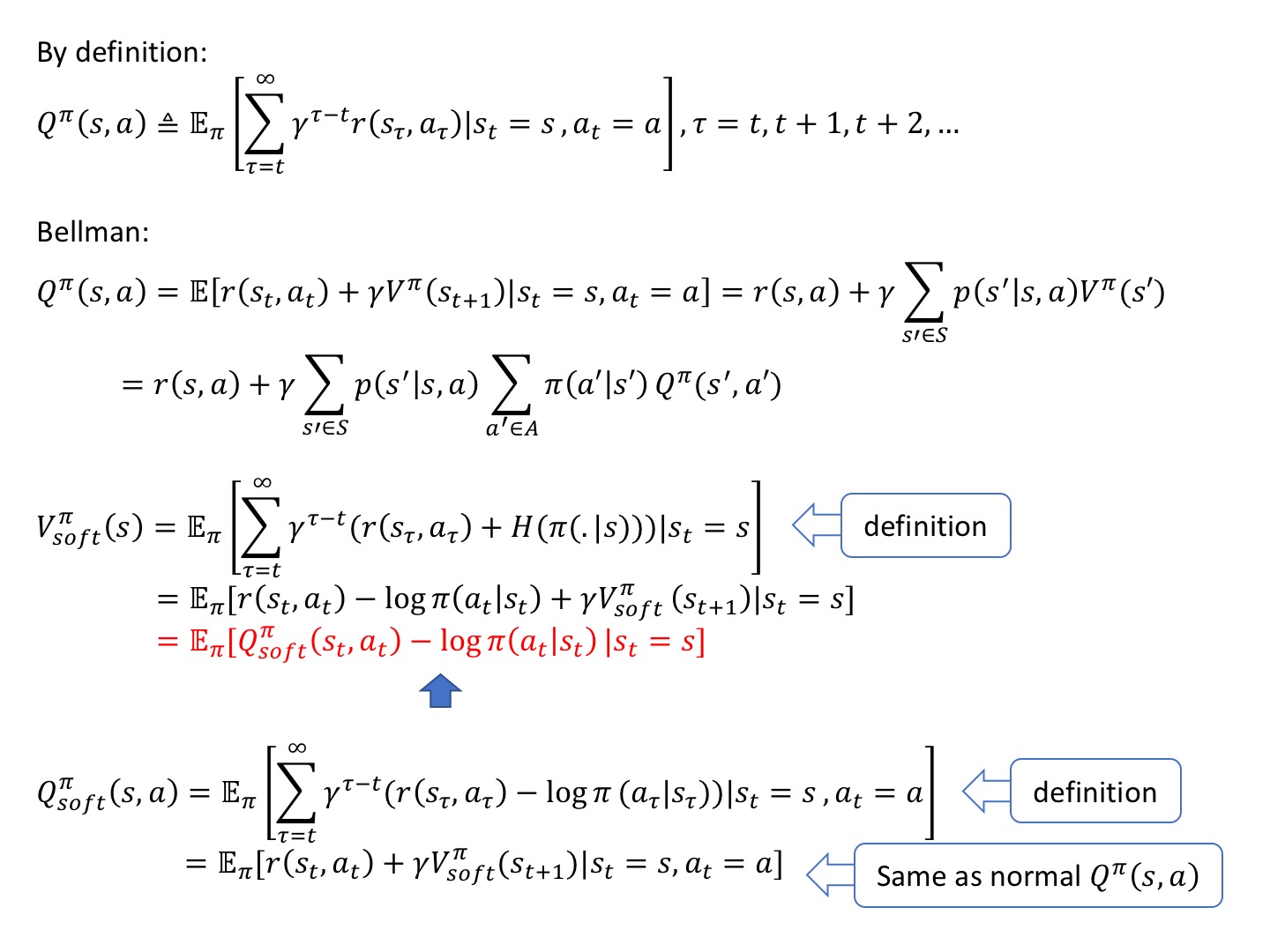
Soft Q-function:
∞
Q^π (st,at) ≜ r(st,at) + E Σ [γ^l (r(s , a) + H(π(.|s))]
soft π l=1 |t+l |t+l |t+l
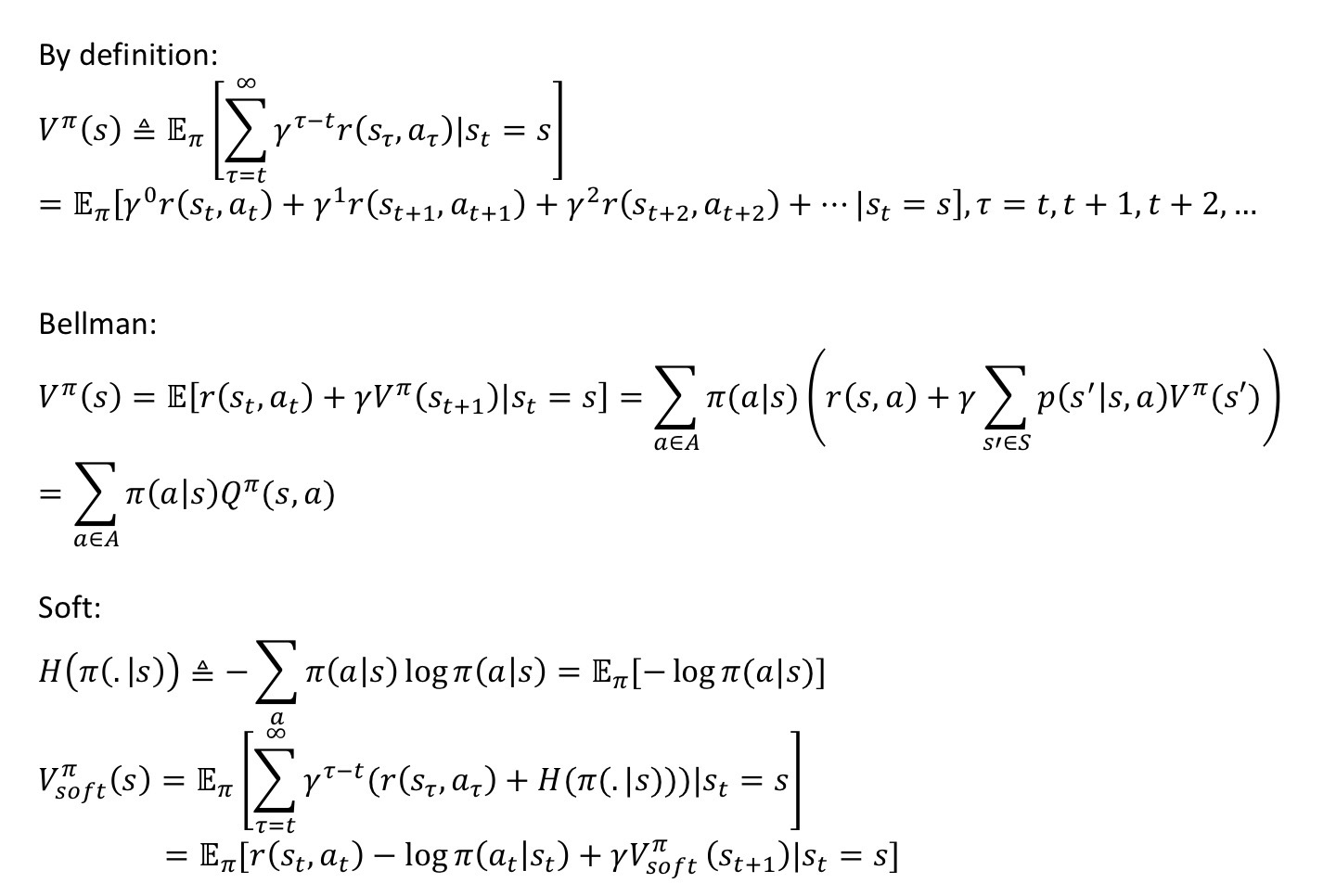
Soft V-function:
V^π (st) ≜ log ∫ exp(Q^π (st,a)) da
soft A soft
Optimal value functions:
Q* (st,at) ≜ max Q^π (st,at)
soft π soft
V* (st) ≜ log ∫ exp(Q* (st,a)) da
soft soft
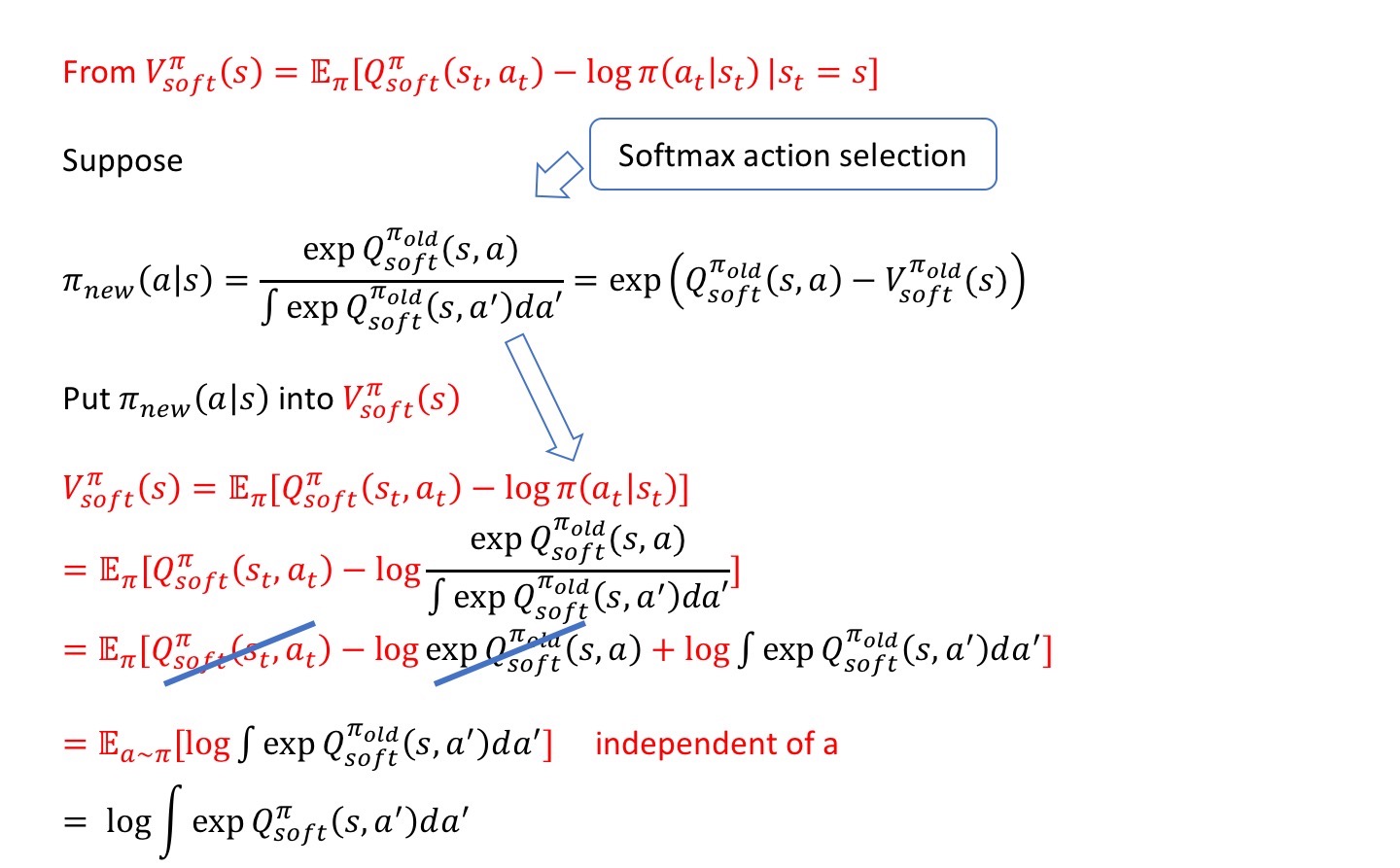
Soft Update Derivation
Reference
Maximum Entropy Policies in Reinforcement Learning & Everyday Life
Learning Diverse Skills via Maximum Entropy Deep Reinforcement Learning
https://towardsdatascience.com/in-depth-review-of-soft-actor-critic-91448aba63d4